10 Attachment(s)
Cách chế tạo hệ thống bơm tưới nước tự động cho cây trồng
FPT telecom hướng dẫn bạn cách chế tạo hệ thống bơm tưới nước tự động cho cây trồng để người dùng có thể phục vụ cho việc tưới tiêu mà không cần phải canh đúng giờ, đây là mô hình nhỏ gọn mà bạn có thể áp dụng theo quy mô lớn để phục vụ cho sản xuất tưới tiêu.
Cách chế tạo hệ thống bơm tưới nước tự động cho cây trồng
Để chế tạo hệ thống bơm tưới nước tự động ta cần sử dụng mạch Arduino dựa vào cảm biến của mạch để hệ thống hoạt động.
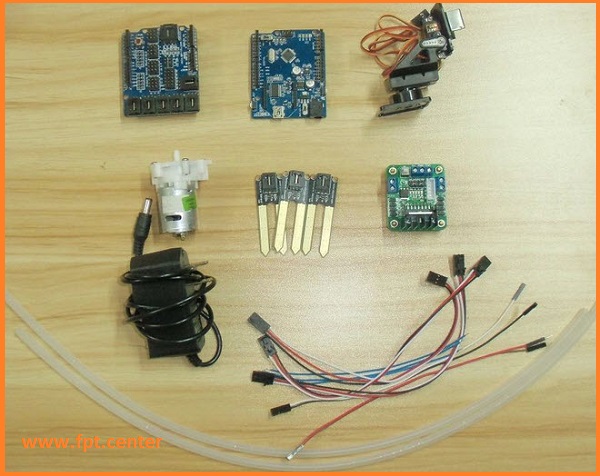
Các dụng cụ cần chuẩn bị để chế tạo mạch Arduino phun tưới nước cho cây trồng:
- Servo và Rotating Platform. Để máy bơm nước đưa nước vào đúng vị trí thì bạn bộ phận kiểm soát khoảng cách và góc độ. Cần phải sử dụng hai Servo.
- Một mạch Crowduino With ATMega 328 và cảm biến Sensor Shield V4.0 dành cho Arduino.
- Nguồn điện và ống nước (trong phần minh họa này sử dụng Adapter 9V-2A AC/DC Power).
- Một máy bơm nước nhỏ với mạch điều khiển. Có thể mua một động cơ máy bơm có công suất nhỏ với khả năng bơm xa khoảng 1 mét. Trường hợp cần thiết bạn có thể trang bị máy bơm lớn hơn để phóng xa hơn cho cả vườn nhà bạn.
- Soil Moisture Sensor (cảm biến độ ẩm của đất), bạn xem chi tiết bên dưới. Mỗi chậu cây cảnh cần đặt một bộ cảm biết độ ẩm của đất, lợi thế của cảm biến này là giá rẻ, cảm biến khá tốt nhưng rất dễ bị ăn mòn khi sử dụng lâu dài.
Đính kèm 8197
Sau khi đã chuẩn bị dụng cụ ta tiến hành chế tạo hệ thống bơm tưới nước tự động:
Bước 1: Gắn các cảm biến độ ẩm đất vào mạch
Trước hết bạn cần phải kết nối các cảm biến độ ẩm đất vào mạch Crowduino và bo mạch Sensor Shield V4.0 (Expansion Board). Tiến hành nối với mạch Crowduino và nối cảm biến với các cổng tương tự A0~A2. Ở đây mình sử dụng cảm biến độ ẩm, trường hợp bạn sử dụng nhiều hơn cần kết nối vào các cổng tương tự khác, nhưng tối đa là 5 cảm biến độ ẩm.
Đính kèm 8198
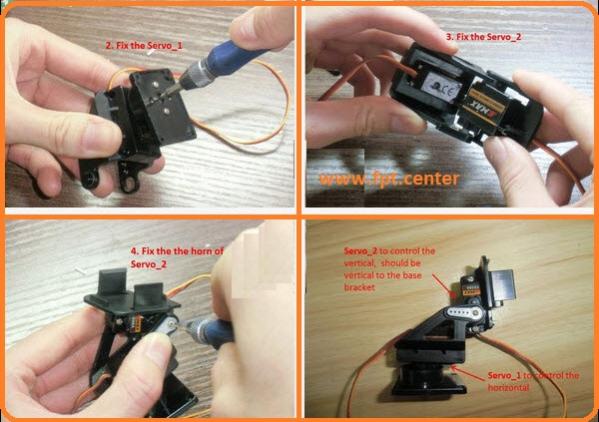
Bước 2: Xây dựng hệ thống quay dựa trên servo
Bạn cần gắn các servo vào hệ thống quay (Rotating Platform), có thể quay góc 160 độ theo chiều ngang hoặc chiều dọc. Trước hết bạn phải cài đặt chương trình MedianValueSetting đến mạch Crowduino và chạy nó. Tiếp theo thì cài đặt servo_1 (để điều khiển servo theo chiều ngang) để cùng hướng với khung base và servo_2 (điều khiển servo theo chiều thẳng đứng) theo chiều dọc của khung base.
Đính kèm 8199
Đính kèm 8200
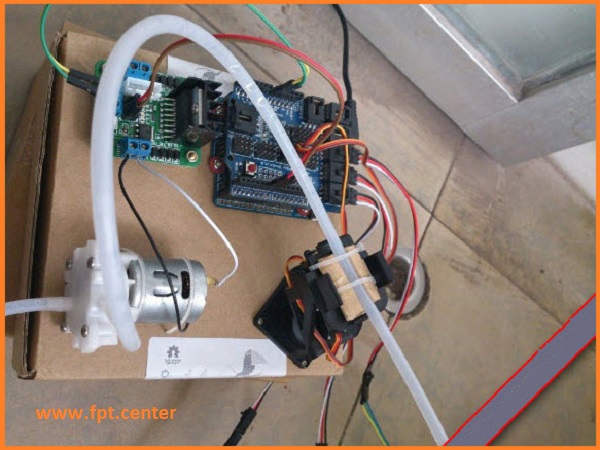
Bước 3: Lắp đặt các ống nước và máy bơm
Trước hết, bạn cắm một đầu của ống nước vào ổ cắm đầu ra của máy bơm nước, sử dụng súng bắn keo để gắn chặt cố định chúng. Tiếp theo lắp ống nước còn lại ở ổ cắm đầu vào của máy bơm, đầu kia cho vào bể chứa nước. Khi đã hoàn thành xong, Tiến hành nối với nguồn điện của máy bơm. Lưu ý, kết nối cực dương (+, có dấu đỏ) đến OUTC của mạch điều khiển, và cực âm (-) đến OUTD.
Đính kèm 8201
Bước 4: Kết nối mạch điều khiển đến mạch Crowduino
Kết nối đầu ra và cổng cung cấp điện của mạch điều khiển đến Crowduino theo các chân như sau:
IND <-> D7
INC <-> D6
GND <-> GND
VCC <-> VIN
Driver <-> Crowduino
Nguồn của Crowduino bằng jack cắm DC Jack kết nối với nguồn 9V.
Đính kèm 8202
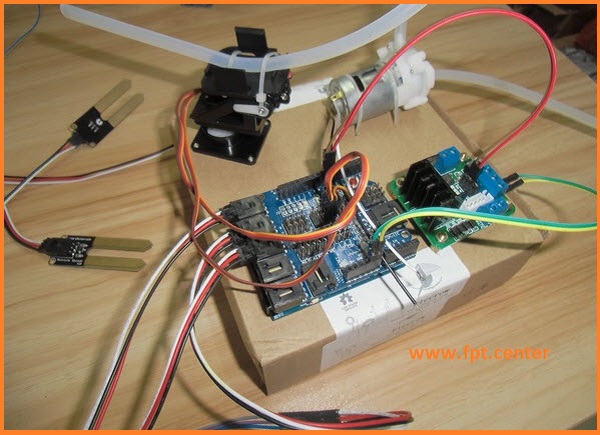
Bước 5: Làm gọn hệ thống bơm và gắn chân đế
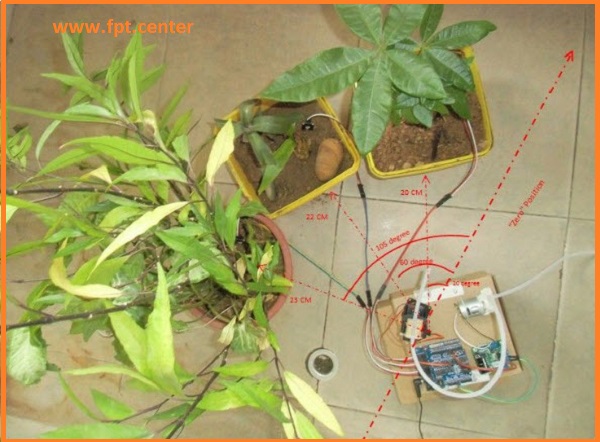
Bạn cho đặt toàn bộ mạch và máy bơm lên một hộp giấy các tông cứng, có thể dùng keo hoặc ốc vít để cố định các bộ phận. Lưu ý, cần điều chỉnh kích thước giữa các bộ phận để bộ phận quay không bị vướn khi hoạt động, sao cho có thể phóng nước xa hơn 30cm và góc 160 độ.
Đính kèm 8203
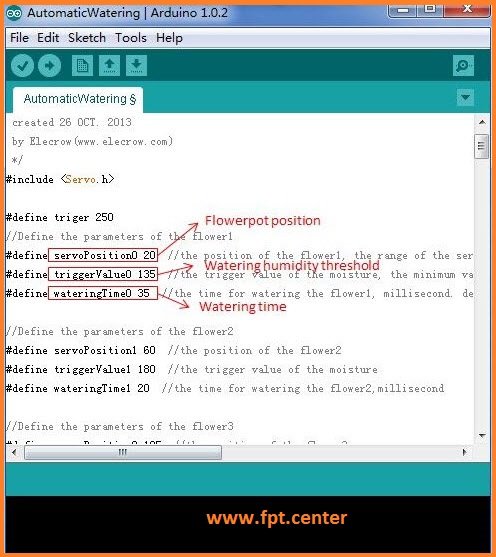
Bước 6: Điều chỉnh các thông số phụ thuộc vào ứng dụng
Bạn có thể tải firmware (trình điều khiển) đã viết sẵn tại AutomaticWatering.zip, rồi thiết lập lại ba thông số chính là ServoPosition_x, Watering humidity threshold, Watering time.
Đính kèm 8204
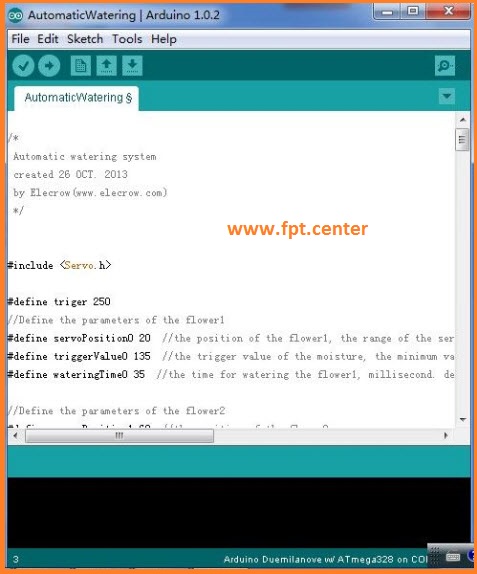
Bước 7: Tiến hành nạp firmware và hoạt động thử nghiệm
Đính kèm 8205
Đính kèm 8206
Sau khi đã thiết lập các thông số, bạn nạp trình điều khiển vào Crowduino và hoạt động thử nghiệm. Nếu không vừa ý thì bạn có thể chỉnh sửa lại các thông số và hoàn thiện dần sản phẩm.
FPT telecom vừa hoàn thành hướng dẫn cách chế tạo hệ thống bơm nước tưới tự động cho cây trồng, chúc các bạn thành công sau bài viết của fpt telecom.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}